
 Campus
Campus  Make Code
Make Code  Open Roberta Lab
Open Roberta Lab  Python
Python Linientreu
Das Fahrzeug hat an der Unterseite zwei Reflexionslichtschranken. Jeder der beiden Lichtschranken hat eine Sender-LED und eine Lichtempfänger. Die Sender-LED sendet ein für uns unsichtbares Licht aus (Infrarotlicht). Trifft das Licht auf einen hellen Untergrund, wirft dieser das Licht zurück und der Lichtempfänger merkt das. Auf einem dunklen Untergrund wird nichts zurückgeworfen.

4 Sekunden geradeaus, mehr nicht!
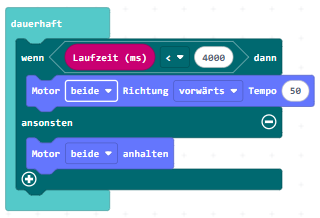
Ziel: Der Calli:bot fährt 4 Sekunden geradeaus. Dann bleibt er stehen.
Geradeaus fahren ist nicht schwer. Es werden beide Motoren für 4 Sekunden mit dem gleichen Tempo angetrieben. Danach werden die Motoren gestoppt.
Obwohl für beide Motoren die gleiche Geschwindigkeit eingestellt wurde, ist das alles andere als eine Fahrt geradeaus. Die Motoren fahren mit geringen unterschiedlichen Geschwindigkeiten. Deshalb müssen die Geschwindigkeiten so geregelt werden, dass das Fahrzeug immer schön auf der Linie bleibt.
Auf der Linie lang
Ob die unten angebrachten Lichtschranken über einen hellen oder dunklen Untergrund sind, sieht man an den beiden blauen LED auf der Oberseite. Bei einem hellen Untergrund leuchten sie auf, ansonsten sind sie aus.
Je nachdem, in welcher Richtung der Calli:bot die schwarze Linie verlassen will, müssen die Motoren mit verschiedenen Geschwindigkeiten gesteuert werden, damit er wieder zurückfindet. Es lassen sich drei Fälle unterscheiden:
- Er ist auf Linie, beiden Motoren bewegen sich mit der gleichen Geschwindigkeit
- Er bricht nach rechts aus: der rechte Motor muss schneller sein als der linke Motor
- Er bricht nach links aus: der linke Motor muss jetzt schneller als der rechte Motor sein.
Gaaaanz wichtig:  ist dann, wenn die rechte Lichtschranke über einem hellen Bereich ist und die blaue LED auf der Oberseite LEUCHTET. Es hat einige Zeit gedauert, bis ich das gemerkt habe 🤪.
ist dann, wenn die rechte Lichtschranke über einem hellen Bereich ist und die blaue LED auf der Oberseite LEUCHTET. Es hat einige Zeit gedauert, bis ich das gemerkt habe 🤪.
Ist die Lichtscharanke über der dunklen Linie, liefert der Sensor eine 1 und die blaue LED leuchtet NICHT.

Der Programmablaufplan zeigt, dass im wenn...dann-Teil des Programmes die Entscheidungen für die unterschiedlichen Geschwindigkeiten der Motoren eingetragen sind. Dazu werden zwei Variablen verwendet, die die langsame und die schnelle Geschwindigkeit enthalten.
Die sonst-wenn-dann-Entscheidung kann durch Klick auf das Plus entsprechend erweitert werden:


Wenn alles richtig läuft, fährt das Auto artig die Linie lang und kann sogar eine Kurve fahren.
Klebt man aus dem schwarzen Isolierband eine geschlossene Bahn, fährt der Roboter auch da lang. Es sieht zwar nicht besonders schön aus, wie er da so langruckelt, aber er hält die Spur.
Erhöht man die Geschwindigkekt für schnell ein wenig, kommt er jedoch durch die Ruckelei vom rechten Weg ab. Damit er nicht vom Tisch rauscht, muss eine weitere Entscheidung im Programm eingebaut werden. Wenn der rechte und linke Linienverfolger gleichzeitig einen hellen Untergrund sehen, müssen beide Motoren gestoppt werden.

Sowie er von der schwarzen Linie herunterfährt, bleibt er stehen.
